球面纹理概述
http://vterrain.org/Textures/spherical.html
Spherical Textures
There are many ways to apply a texture map to a sphere. It is an important process because of applications such as texture-mapping the entire surface of the earth.
- naive approach: directly map latitude-longitude onto sphere
- source: a single rectangular texture with a proportion of 2×1
- texture coordinates: u goes from 0 to 1 around the equator, v goes from 0 to 1 from pole to pole
- pro: simple, most data sources are already in this format
- con: wastes the majority of the texture resolution at the poles, where it is usually least needed
- BlueMarbleViewer used this approach, as did apparently a few other early spinny globes
- cubic mapping
- source: 6 textures corresponding to sides of a cube surrounding the sphere
- uv mapping is projected (e.g. with Gnomonic Projection) from the surface of the sphere to the sides of the cube
- pro: more evenly distribution of texels than the naive approach
- con:
- the projection is a non-linear warp, making the computation difficult
- still has wide variation in ratio of texels/surface area
- For many other possibilities, see Map Projections: Cubic Globes
 Omnitect mapping
Omnitect mapping
- like cubic mapping, uses four equatorial textures and two polar
- however, the equatorial textures use a direct lat-lon mapping, and the poles are treated specially by joining four spherical right triangles of the top and bottom latitudes
- pro: takes advantage of simple direct lat-lon mapping for most of the non-polar surface
- con
- complicated special cases for the tile boundaries
- two types of mapping with different requirements for subdivision and projection
- detail: see slides on global tiling system
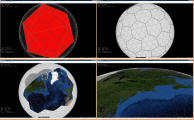
- icosahedral mapping
- like cubic mapping, but using an icosahedron
- source: pairs of the icosahedron’s faces can be joined into quads, for 10 square source textures
- uv mapping: uv is simply (0,0), (1,0), (0,1) at the corners of each triangular face
- pro:
- less distortion than other approaches, evenly distributed texels/surface area
- elegant system of identical regular triangles
- con:
- rendering must explicitly store and draw all 20 faces of the icosahedron
- more tile boundaries to deal with
- when applied to the earth with boundaries arranged to avoid breaking land masses, this is known as Buckminster Fuller’s Dymaxion Projection
- overview: Fuller Projection at the BFI site
- great resource: Robert W. Gray’s Notes to Buckminster Fuller’s World Maps includes comparison of related projections, and source code!
- also available is a Perl implementation Geo::Dymaxion by Schuyler Erle
- this is now implemented in the VTP software
- a pre-processing utility projects a conventional earth texture map onto 20 faces (10 square texture maps)
- at runtime, spherical icosahedron is created, with one mesh per face, in Enviro
-
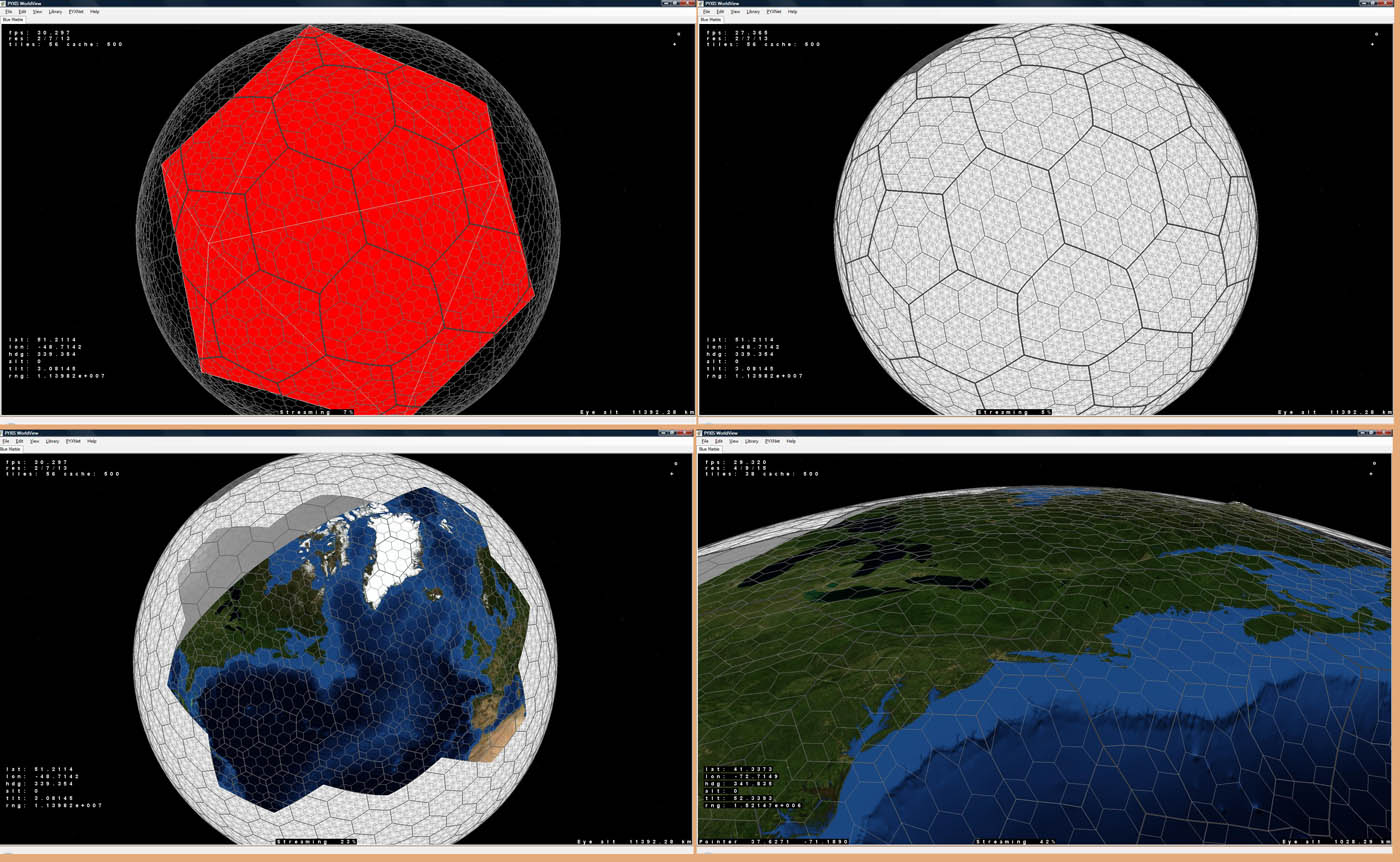
 another icosahedral system is the Pyxis Digital Earth Reference Model (DERM)
another icosahedral system is the Pyxis Digital Earth Reference Model (DERM)
- they call it a “Icosahedron Snyder Equal Area Aperture 3 Hexagonal Grid” (ISEA3H)
- this provides a way to index every point on the earth, without using lat-lon or any conventional coordinate system
- octahedral
- see Exoflight on the spherical LOD page
- Aasgaard’s map projection
-
 developed for the Norkart Virtual Globe, Rune Aasgaard’s map projection page has a good PowerPoint presentation illustrating the approach, example source code of the transformation, and other supporting documents
developed for the Norkart Virtual Globe, Rune Aasgaard’s map projection page has a good PowerPoint presentation illustrating the approach, example source code of the transformation, and other supporting documents - basically maps a quadtree onto a Mercator-like projection, with the depth of the tree’s branches decreasing towards the poles
- benefit is that the texels stay close to square
- disadvantage is that the poles behave badly (distortion, wasted texture memory) which is often not a problem since they are “small and usually insignificant”
- published academically as “Projecting a Regular Grid onto a Sphere or Ellipsoid”, Rune Aasgaard, in: “Advances in Spatial Data Handling”, Dianne Richardson and Peter van Oosterom (eds.), Springer-Verlag 2002, pp 339-350
-
- ORBITER Space Flight Simulator
- free (but closed-source), supports paging of a ~2km earth texture (16kx8k)
- the author, Martin Schweiger explains: “Orbiter splits the surface into latitude strips, and each latitude strip is cut into n patches, where n is approximately proportional to cos(latitude), to maintain a roughly constant resolution level at all latitudes. Orbiter also uses a multi-resolution approach, where the patch size and resolution is dependent on the apparent diameter of the planet and camera distance from the surface. It also implements a culling mechanism which renders only patches that are visible from the camera position (so that the render load is roughly independent of camera altitude and texture resolution), and it allows the application of spatially varying surface texture resolutions (e.g. higher resolution around interesting features.”

Resources
- Map Projections and Spatial Referencing for Global Data Sets
- NGDC/NOAA Icosahedron Globe
- International Conference on Discrete Global Grids (March 2000)
- Discrete Global Grids for Digital Earth (pdf), Michael Goodchild, UCSB
- should locate:
- John P. Snyder, “An Equal-Area Map Projection For Polyhedral Globes”, Cartographica, Vol. 29, No. 1, 1992, pp. 10-21
- Dutton, G. (1998) A Hierarchical Coordinate System for Geoprocessing and Cartography. Lecture Notes in Earth Science 79.
发表回复